Fish catch and gear monitoring provides control of the capture process and can contribute to reduced unintended fishing mortality and more precise and effective capture. As part of the project «Catch control in pelagic purse seine fisheries» (FHF 901350) different methods for acoustic catch control during purse seining have been investigated. In this report we present work on applying Simrad catch monitoring system mainly used in trawl fisheries to purse seine fishing. The wireless sensors have built-in echosounders that provide useful information about trawl catches. We have investigated whether the system with some modifications can provide similar useful information about catch size and position in purse seine fisheries. The results show that work remains before the sensor system can be useful and practical in commercial purse seine fisheries. However, there is good potential. Stable contact with vessel-based hydrophone was achieved by deploying the hydrophone deeper in the water. Stable and robust deployment of sensors is possible in the main body of the net below the float line as well as in the purse rings. There were indications of fish detections in the echosounder data. The question is whether the beam of the echosounder in the sensor is too wide to effectively detect fish in the purse seine and if several narrower beams should be considered. We provide guidelines for mounting and using purse seine sensors and suggest further development work.
Akustisk sensor for fangstkontroll i notfiske
— Spesifikasjoner for montering og bruk
Rapportserie:
Rapport fra havforskningen 2021-11
ISSN: 1893-4536
Publisert: 09.03.2021
Prosjektnr: 15130
Oppdragsgiver(e): Fiskeri- og havbruksnæringens forskningsfinansiering
Referanse: 901350
Program:
The Norwegian Sea
Approved by:
Research Director(s):
Geir Huse
Program leader(s):
Bjørn Erik Axelsen
English summary
Sammendrag
Fangst- og redskapsovervåking gir kontroll over fangstprosessen og kan bidra til å redusere utilsiktet dødelighet og gi et mer målrettet og effektivt fiske. I prosjekt «Fangstkontroll i notfiske etter pelagiske arter» (FHF 901350) har vi undersøkt ulike akustiske metoder for fangstovervåking under notfiske. I denne rapporten presenterer vi forsøk der vi har tilpasset Simrads fangstkontrollsystem utviklet hovedsakelig for trål til fiske med snurpenot. De trådløse sensorene har et innebygget ekkolodd som informerer skipperen om fangstmengde i trålen. Vi har undersøkt om sensorene med noen tilpasninger til fiske med not kan gi like nyttig informasjon om fangstmengde og fiskens posisjon i nota. Resultatene viser at det gjenstår arbeid før systemet kan være en praktisk og nyttig løsning. Likevel har det helt klart potensial. God kontakt mellom sensor og hydrofon oppnås ved å ha hydrofon dypere i vannet. Stabil og robust montering av sensorer, fungerte best med sensor festet på nota noen meter under flåen, men også i snurperingene nederst i nota. Det var antydning til identifikasjon av fisk på ekkoloddene. Spørsmålet er om ekkoloddet i notsensoren har bra nok oppløsning for identifisering av fangst eller om det må vurderes flere smalere stråler istedenfor en bred stråle. I rapporten gir vi anbefalinger for montering og bruk av notsensor samt forslag til videre utviklingsarbeid.
1 - Bakgrunn
Effektiv fangst- og redskapsovervåking gir kontroll over fangstprosessen og kan bidra til å redusere utilsiktet dødelighet og gi et mer målrettet og effektivt fiske. Fangst og redskapsovervåking er også viktig for forståelse av redskapets oppførsel og interaksjoner med fisk. Til tross for utvikling innen akustiske og optiske undervannsobservasjonsplatformer (AUVer, droner, sensorsystemer etc.) og metoder for estimering av fiskestimstørrelse (Peña et al., 2021), individstørrelse (Kubilius et al., 2020) og artsidentifikasjon (Korneliussen et al. 2009) er instrumentering i snurpenot etter at nota er blitt satt ut i sjøen stort sett manglende.
Fiske med snurpenot er effektivt og relativt miljøvennlig med lavt drivstoffbruk i forhold til fangstmengde (Suuronen et al., 2012) og lite bifangst sammenlignet med mange andre fiskemetoder (Pérez et al., 2019). Fiskestimene blir lokalisert og evaluert med akustiske instrumenter før fangst. Stimens størrelse og atferd blir vurdert med fiskerisonar og om mulig med skrogmonterte ekkolodd (som ser nedover) som kan gi mer detaljert informasjon om f.eks. art, fisketetthet og vertikalfordeling. Problemet er at det ofte ikke er mulig å gå over pelagiske stimer med båten uten å skremme fisken. Det hender også at stimene er større enn det som er ideelt med hensyn til fangstkvalitet eller lastekapasiteten om bord, og man ønsker derfor å kun fange en del av stimen. Tette stimer og fisk som går i tynt slør er også vanskelige å estimere. Derfor har ikke skipperen alltid full kontroll over hva han får i nota og det kan bli behov for å slippe hele eller deler av fangsten på grunn av feil art, størrelse eller mengde. Det er da viktig å ha informasjon om fangsten tidlig i kastet for å unngå slipping i en sen fase eller eventuelt notsprenging med risiko for høy fiskedødelighet (Anders et al., 2019; Marcalo et al., 2019; Misund and Beltestad 1995). Det kan også være vanskelig å fange raskt-svømmende fisk som makrell og makrellstørje og da kan god kontroll over redskapet i forhold til fiskestimen øke fangstsuksessen.
Det er utfordrende å måle fisken inni nota. Nota er stor og fleksibel, endrer kontinuerlig form og til å begynne med svømmer fisken i et stort volum. Det er risikabelt å ha fiskerisonarene nede når nota er ute på grunn av fare for at nota hekter seg på og skader sonaren. Det er utviklet sonarer som er festet direkte på skroget og dermed trygge å bruke under hele fangstprosessen, men det er ofte mye luftobler, støy fra maskineri og not mellom sonar og fiskestim og vanskelig å identifisere fiskestimen (Tenningen et al., 2018).
Prosjekt «Fangstkontroll i notfiske etter pelagiske arter» (FHF, 901350) har som mål å oppnå bedre fangstkontroll i ringnotfiske gjennom å utvikle instrumenter og analysemetoder som gir bedre grunnlag for beslutninger under fangstprosessen. Denne rapporten omhandler en del av prosjektet der vi undersøker om akustisk instrumentering montert på eller inni nota kan være en praktisk måte å overvåke fangsten på.
1.1 - Vurdering av ulike metoder
Vi har gjort innledende forsøk og vurdert ulike løsninger for fangstovervåking i notfiske med instrumenter montert på eller inni nota; frittflytende bøye med ekkolodd (Figur 1), ekkolodd montert under flyvende drone (Figur 1) og trådløse sensorer med ekkolodd montert på nota.
Det ble gjort forsøk på å måle fisken inni nota med en frittflytende trådløs bøye utstyrt med ekkolodd (Simrad ES14-38 og ES14-200 transdusere og Simrad WBT mini tranceiver, Kongsberg Maritime AS) (Tenningen et al., 2018, Figur 1). Med to ulike akustiske frekvens kan det være mulig å skille makrell fra sild (Korneliussen et al., 2009) og i teorien sild fra notlin (Tenningen et al., 2018). Ekkoloddet som ble brukt i bøyen kan også gi nøyaktige estimat på fisketetthet som igjen kan gi en indikasjon på mengde fisk i nota. Fordelen med en frittflytende bøye er at det er lite begrensning på vekt på instrumentering (f.eks. sammenlignet med flyvende drone) og bøyen vil heller ikke bli utsatt for like røff behandling som instrumenter montert på nota. Utfordringen i våre forsøk var at det var vanskelig å få bøyen langt nok ut i nota og uten særlig kontroll på bøyens posisjon drev den lett inn i flåen. Bøyen var også utsatt for bølger og overflatestøy (f.eks. bobler fra bølgeskvulp). For at dette systemet skal være praktisk i fiskerier er det behov for enkel utsetting og opptak, en form for styring og en annen utforming som gjør at transduseren er dypere i vannet og mindre utsatt for bevegelsene i overflaten.
I samarbeid med Birdview AS har Havforskningsinstituttet gjort forsøk med flyvende drone med ekkolodd (Simrad ES200 – 7CDK transduser og Simrad WBT mini transceiver, Kongsberg Maritime AS) (Figur 1). Målet var å fly dronen ut til fiskestimer detektert med fiskerisonaren eller måle fisken inni nota etter at denne var satt og måle fiskestørrelse, tetthet og vertikalfordeling. Dette er et interessant konsept for fiskerier i fremtiden der dronen raskt kan fly ut og inspisere fiskestimer identifisert med sonar. Transduseren senkes noen meter under overflaten med hjelp av elektrisk vinsj og er lite påvirket av bølger. Utviklingen videreføres av Birdview AS.
En på kort sikt mer praktisk og rimeligere løsning er montering av trådløse ekkolodd på nota. Ved å ta i bruk et allerede eksisterende fangstovervåkningssystem for fiske med trål krevdes det lite utviklingstid for å tilpasse dette til fangstovervåking i notfiske. Spørsmålet er om sensorene som er utviklet for trålfiske kan fungere i notfiske der det er behov for betydelig lenger rekkevidde, og fisken kan svømme i et større volum. Det var også behov for å utvikle praktiske metoder til å feste sensorene på nota og sikre stabil kontakt med hydrofon på båten. Førsøkene blir presentert i denne rapporten sammen med spesifikasjoner for montering og bruk i notfiske og anbefalinger for videre utviklingsarbeid.
1.2 - Mål
Undersøke om trådløse sensorer med innebygget ekkolodd kan gi nyttig informasjon om fangsten (mengde og posisjon i nota) i pelagisk notfiske.
Delmål:
-
Tilpasse eksisterende trålsensorsystem til bruk i notfiske
-
Utvikle praktisk og stabil montering og bruk av sensorer på nota for ekkoloddregistreringer av fangst og trådløs dataoverføring til båt
-
Undersøke om sensoren gir nyttig informasjon om fangsten i nota
1.3 - Nytteverdi for flåten
Kontroll på hvor fisken står i nota og et tidlig estimat av mengde fisk er viktige opplysninger for skipperen. Å vite hvor fisken står i forhold til not og båt i en tidlig fangstfase er avgjørende for å unngå bomkast. Er fangsten for stor eller fisken av feil størrelse kan skipperen ta en tidlig avgjørelse om det er behov for å slippe hele eller deler av fangsten.
Sensorsystemet som er brukt her gir informasjon om mengde fisk som går inn i en trål og hvor fisken står i forhold til trålen. For at dette systemet skal kunne fungere i notfiske må sensorene være praktiske i bruk, robuste, og gi troverdig og nyttig informasjon. Dette krever blant annet at kontakten mellom sensor og mottaker på båten er stabil, at man må klare å skille mellom fisk og støy i ekkogrammene og til slutt gi et estimat av hvor mye fisk det er i nota og hvor i nota fisken står.
Vi har utviklet og testet metoder for stabil montering av sensorer, god kontakt mellom sensor og hydrofon og gjort noen erfaringer med datakvalitet. Det gjenstår arbeid for å få bra kvalitet på informasjonen som trekkes ut av data fra ekkolodd, identifisere best mulige innstillinger for ekkolodd, samt mer praktiske løsninger for montering av sensorer og hydrofon for kommersielt fiske. Forsøkene ble gjennomført i nært samarbeid med Kongsberg Maritime AS og vi har hatt noen diskusjoner med Marport som har utviklet lignede sensorer (Marport Seine Explorer) og viste interesse for våre forsøk. Dermed håper vi at dette arbeidet kan bidra til videreutvikling av et system tilgjengelig for kommersielt bruk.
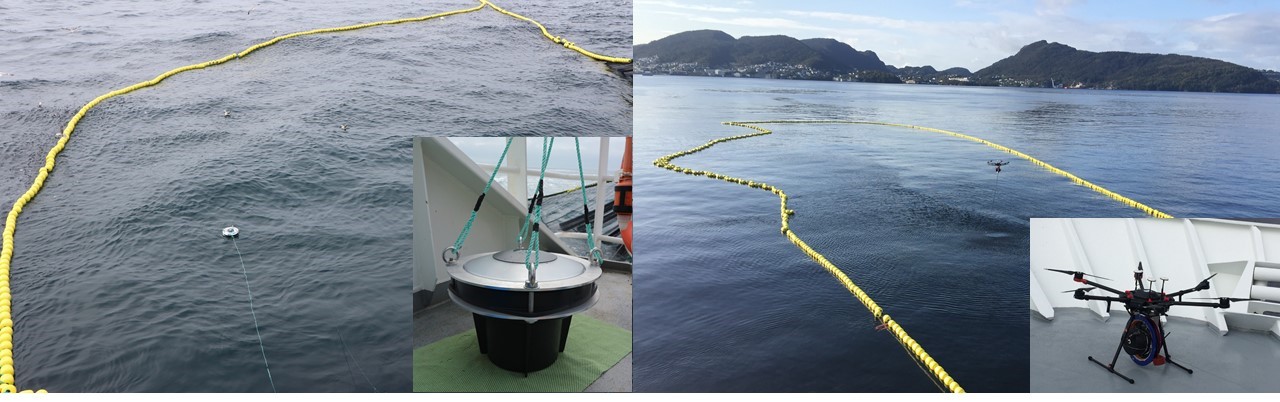
Figur 1. To ulike løsninger for utsetting av ekkolodd i nota for fangstovervåking; Til venstre: Frittflytende bøye med Simrad ES14-38 og ES14-200 transdusere og transceiver WBT mini (Kongsberg Maritime AS). Til høyre: tidlig versjon av flyvende drone (Birdview AS) med Simrad ES200 – 7CDK transduser med Simrad WBT mini transceiver (Kongsberg Maritime AS). Instrumentpakke er montert på innsiden av elektrisk vinsj med kabel og transduser.
2 - Sammendrag av gjennomførte forsøk og resultat
I 2019 og 2020 ble det gjennomført fire forskningstokt under kommersielle fiskeforhold i Nordsjøsilde-, Norsk vårgytende (NVG) silde- og makrellfiske med M/S Vendla og M/S Fiskebas. Det ble gjort forsøk med å montere og samle data fra en eller flere notsensorer i 30 notkast (Tabell 1). Mellom toktene ble det gjort endringer og forbedringer i montering og plassering, kommunikasjon, datavisualisering og sensorutforming basert på resultater fra forrige tokt. Her følger et sammendrag av forsøkene og de oppnådde resultatene. Forsøkene er presentert i mer detalj i de relevante toktrapportene (Tenningen et al. 2019; 2020a; 2020b).
2.1 - Valg av sensorsystem
Forsøkene er blitt gjennomført i samarbeid med Kongsberg Maritime AS. Metoden er basert på deres eksisterende fangstovervåkingssystem som er blitt tilpasset til notfiske. Systemet består av multifunksjonelle sensorer med innebygget ekkolodd (Simrad PX sensor). Dataene fra sensoren blir sendt i sanntid over akustisk kobling til skrogmontert hydrofon. Hydrofonen er koblet til mottaker (for eksempel, Simrad SR70 eller SR15) og fra mottaker sendes dataene videre til pc med Simrad TV80-software for visualisering.
De trådløse sensorene har i tillegg til ekkolodd, måling av pitch, roll, dybde og temperatur. Ekkoloddet har en frekvens på 200 kHz og åpningsvinkel på 33°. Sensorene er i utgangspunktet utviklet til fangst og redskapsovervåking i trålfiske, men lignende sensorer brukes til dybdemålinger i notfiske. Sensorene ble tilpasset bruk i not gjennom å endre på de relative retningene på signalene for fangstovervåking (ekkolodd) og kommunikasjon med båt (Figur 2). Når den modifiserte sensoren (notsensoren) henger vertikalt (som vist i figur 2) går signalet for kommunikasjon med mottaker på båt horisontalt og har 60 graders åpningsvinkel og ekkoloddet med 33 graders åpningsvinkel er rettet 30 grader ned.
Behovet for rekkevidde på ekkoloddet er større i notfiske sammenlignet med trålfiske der trålåpningen er vesentlig mindre enn diameteren på en not. For at man skal klare å identifisere fiskestimen som beveger seg inni nota på ekkogrammet må det være relativt høy oppløsning i dataene både i rom og tid. Med økende rekkevidde, øker samplingsvolum og oppløsningen reduseres. I tillegg reduserer pingraten fra 1.1s til 2s når man går over 100m rekkevidde på ekkoloddet. Rekkevidden må dermed veies mot ønsket oppløsning. Det ble gjort forsøk med 100 og 200 meters rekkevidde.
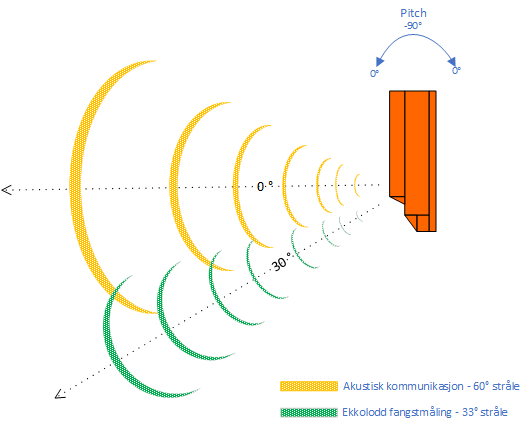
Figur 2. Illustrasjon av fangstovervåkingssensor tilpasset fiske med not. Akustisk kommunikasjon med mottaker på båt (60° åpningsvinkel og 0° pitch) og 200 kHz ekkolodd (33° åpningsvinkel og -30° pitch).
|
Tabell 1. Sammendrag av forsøk med notsensorsystemet. En til tre notsensorer var festet på nota, enten i snurperingene eller på selve nota noen meter under flåen ved 1/2, 1/4 eller 1/3 av notas totallengde målt fra notøret. Det ble brukt enten skrogmonterte hydrofoner eller portabel hydrofoner. |
|||||||
| Tokt | Fartøy | Art | Kast | Dato | Notsensor antall (plassering) | Hydrofon antall (type) | Fangst (t) |
| 1 | MS Vendla | NS sild | 1 | 15.06.2019 | 1 († ½) | 2 (†, ††) | <10 |
| NS sild | 2 | 17.06.2019 | 1 († ½) | 2 (†, ††) | 125 | ||
| NS sild | 3 | 19.06.2019 | 1 († ½) | 2 (†, ††) | 23 | ||
| NS sild | 4 | 23.06.2019 | 1 († ½) | 2 (†, ††) | 8 | ||
| NS sild | 5 | 23.06.2019 | 1 († ½) | 2 (†, ††) | 15 | ||
| NS sild | 6 | 23.06.2019 | 1 († ½) | 2 (†, ††) | 15 | ||
| 2 | MS Fiskebas | Test | 1 | 18.09.2019 | 1 († ¼) | 1 (†) | NA |
| Makrell | 2 | 19.09.2019 | 1 (†½) | 1 (†) | 220 | ||
| Makrell | 3 | 21.09.2019 | 1 (†½) | 1 (†) | 0 | ||
| Makrell | 4 | 22.09.2019 | 1 (†½) | 1 (†) | 400 | ||
| Makrell | 5 | 25.09.2019 | 1 (†½) | 1 (†) | NA | ||
| Makrell | 6 | 25.09.2019 | 1 (†½) | 1 (†) | ~600 | ||
| Makrell | 7 | 25.09.2019 | 1 (†½) | 1 (†) | 0 | ||
| Makrell | 8 | 28.09.2019 | 1 (†½) | 1 (†) | 0 | ||
| Makrell | 9 | 29.09.2019 | 1 (†½) | 1 (†) | 0 | ||
| Makrell | 10 | 29.09.2019 | 1 (†½) | 1 (†) | 40 | ||
| Makrell | 11 | 29.09.2019 | 1 (†½) | 1 (†) | 30 | ||
| Makrell | 12 | 29.09.2019 | 1 († ½) | 1 (†) | 190 | ||
| 3 | MS Fiskebas | Test | 1 | 25.02.2020 | 2 (†† ½; ††¾) | 3 (†,§) | 0 |
| Test | 2 | 25.02.2020 | 3 (†½, †† ½; ††¾) | 3 (†, §§) | 0 | ||
| Test | 3 | 25.02.2020 | 3 (†½, †† ½, ††¾) | 3 (†, §§) | 0 | ||
| Test | 4 | 28.02.2020 | 3 († ½, †¾, ††½) | 3 (†, §§) | 0 | ||
| 4 | MS Fiskebas | Test | 1 | 15.10.2020 | 3 († ½, †¾, ††½) | 2 (†, §§) | NA |
| Makrell | 2 | 16.10,2020 | 3 († ½, †¼, ††½) | 2 (†, §§) | 45 | ||
| Makrell | 3 | 16.10.2020 | 3 († ½, †¼, ††½) | 2 (†, §§) | 33 | ||
| Makrell | 4 | 16.10.2020 | 3 († ½, †¼, ††½) | 2 (†, §§) | 0 | ||
| Makrell | 5 | 16.10.2020 | 3 († ½, †¼, ††½) | 2 (†, §§) | 480 | ||
| Test | 6 | 19.10.2020 | 3 († ½, †¼, ††½) | 2 (†, §§) | NA | ||
| NVG sild | 7 | 20.10.2020 | 3 († ½, †¼, ††½) | 2 (†, §§) | 140 | ||
| NVG sild | 8 | 20.10.2020 | 3 († ½, †¼, ††½) | 2 (†, §§) | 500 | ||
| Sensor plassering †=under flåen, ††=i snurperingene (½, ¼, ¾) = andel av notas totale lengde målt fra notøret. Hydrofon: †=skrogmontert not, ††=skrogmontert trål, §=portabel < 10m, §§=portabel >10 m | |||||||
2.2 - Kommunikasjon
Kommunikasjon til båten foregår akustisk der en hydrofon montert på båten mottar data fra sensoren. Ringnotbåtene har vanligvis skrogmontert hydrofon som mottar data fra dybdesensor i snurperingene. M/S Fiskebas og M/S Vendla er utstyrt med Simrad PI purse seine hydrophone med 90 graders horisontal og 30 graders vertikalstråle. Hydrofonen er rettet mot styrbord side og kommuniserer med dybdesensor i not. MS Vendla er en kombinert ringnot båt og pelagisk tråler og har dermed også en trål hydrofon (Simrad PI Trawl hydrophone) som mottar data fra trålsensorer. Hydrofonen har en 50 graders horisontal og 30 graders vertikalstråle og er rettet akterut på båten.
De første forsøkene viste at kontakten mellom skrogmontert hydrofon og notsensor varierer mye avhengig av fiskeforhold, bruk av hoved- og baugpropell og fangstfase. Spesielt under snurping var kontakten dårlig da det ofte er mye luftbobler fra propellere og støy fra maskineri (Figur 3). Simrad SR70 mottakeren som ble brukt i forsøkene kan kobles til 4 hydrofoner og i tillegg til de skrogmonterte hydrofonene brukte vi portable hydrofoner (Simrad PI portable hydrophone og Simrad PI purse seine hydrophone). Hydrofonene ble senket ned omtrent midtskips på babord side lengre ned enn de skrogmonterte hydrofonene for å komme under luftbobler fra propellere (Figur 4). Hydrofon som ble senket til 12 m dybde (målt med dybdesensor) med en elektrisk vinsj hadde god og stabil kontakt med sensorene og var også enkel å operere i fiskeri (Figur 3 og 4). De portable hydrofonene viste om lag lik signalstyrke, til tross for forskjellige åpningsvinkler. Noe som tyder på at hydrofonstrålens åpningsvinkel ikke er kritisk.
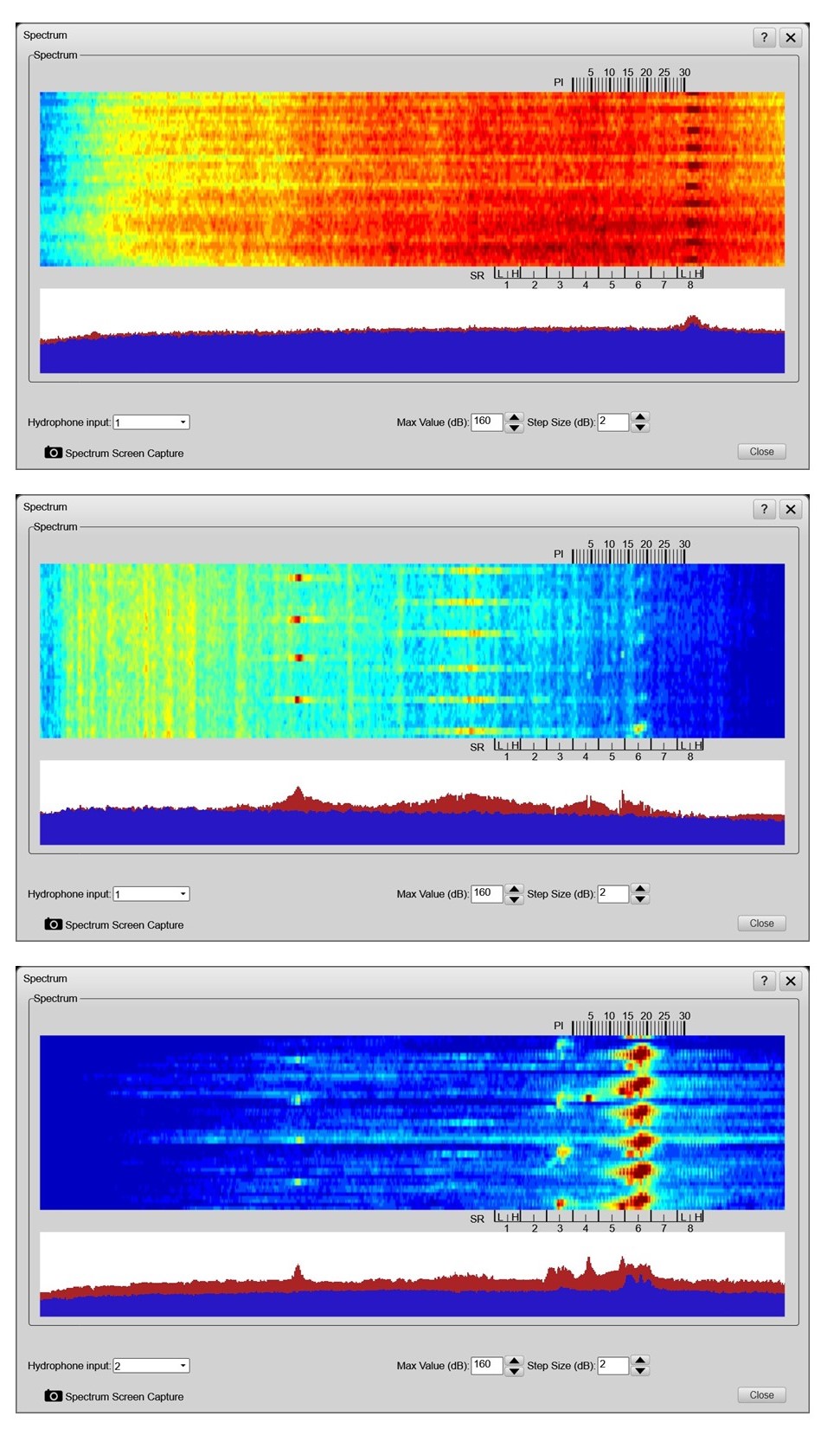
Figur 3. Spektrum som viser styrken på signalet mellom hydrofon og sensor i forhold til styrken på bakgrunnsstøy. Sensorene var konfigurert i kanal 3 og 6 og kan i det nederste bildet sees som mørkerøde runde merker. Øverst er spektrum under snurping med skrogmontert hydrofon. I midten: skrogmontert hydrofon i sluttfasen av snurping / startfasen av innhaling og nederst: portable hydrofon på 12 m fra samme tidspunkt som midterste figur. Styrken på signalene går fra blå (svak) til mørkerød (sterk). Signalene fra sensor er kun synlige i det nederste bildet hvilket tyder på at kontakten var dårlig i de to øvre bildene. Spesielt i det første bildet er det veldig sterk bakgrunnsstøy.

Figur 4. Ulike løsninger for montering av portable hydrofoner som ble senket ned fra babord side til 7 – 12 m dybde. Venstre: stang med pan and tilt unit og nothydrofon; Midten: stang med omnihydrofon; Høyre: elektrisk vinsj montert på rekkverket og omnihydrofon, blylodd ble brukt for å hindre avdrift på grunn av strøm.
2.3 - Plassering av sensor i nota
En eller flere sensorer kan monteres i nota. Plasseringen er avhengig av hvilken fase av fisket man ønsker å fokusere på. Sensorer montert fra midtnot og mot trekant (Figur 5) kommer ombord tidlig under innhalingen og dekker dermed ikke siste delen av prosessen der fangsten er i et mindre volum og begynner å bli trengt. Sensorer nærmere tørka er lenger tid ute i sjøen, men det viser seg at det blir problemer med kontakt mellom sensor og hydrofon når strålen med 60 graders åpningsvinkel peker parallelt med skutesiden. Sensorene må også plasseres et sted der det er minst mulig bevegelse i nota. I våre forsøk var vi i tillegg avhengige av å ta av sensorene før nota gikk gjennom triplex da de ikke var konstruert for dette. Sensorene ble forsøkt montert på forskjellige plasser i nota enten i snurperingene eller noen meter under flåen (Figur 5).
Montering av sensor omtrent midt på notas lengde gav best resultat både når sensor var montert under flåen og i snurperingene. Datakvaliteten og kontakten med hydrofon var bedre sammenlignet med montering på ¼ eller ¾ notlengde. Grunnen til dette kan være at det er noe mindre bevegelse i nota, mindre sannsynlighet for folder av not foran sensor og det akustiske signalet for kommunikasjon er rettet mot hydrofonen og man har dermed god kontakt.
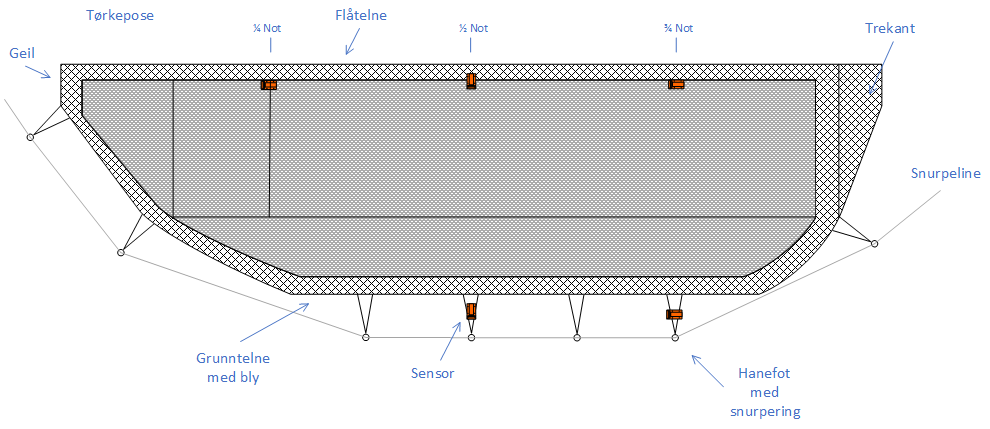
Figur 5. Omtrentlig plassering av sensorer i nota. Antall sensorer og plassering varierte mellom tokt og kast som vist i tabell 1.
2.4 - Montering av sensor i nota
Montering av sensorer i en snurpenot er utfordrende ettersom nota er stor, fleksibel og kontinuerlig i bevegelse under utsetting, snurping og innhaling. I tillegg beveger, spesielt den øvre delen av nota seg opp og ned med bølgene. Sensoren blir også utsatt for stor påkjenning, spesielt når nota går over rekka og ut. Sensorene som ble brukt i forsøkene er relativt robuste og laget for bruk fiskeri, men det er viktig at de er godt festet for å ikke bli revet av. I tillegg må sensorene monteres på en måte der de henger mest mulig stabilt og ikke påvirkes av bevegelser i nota.
I de første forsøkene ble sensoren under flåen plassert i en notlinpose med kjetting nederst som vekt for at den skulle henge mest mulig stabilt (Figur 6a). Montering ble forbedret underveis for bedre stabilitet og man endte opp med en relativt lett ramme av stål. Sensoren ble festet inni rammen, overkanten av rammen ble festet i nota, i tillegg festet man et tau løst fra nedre kant av rammen til nota for å unngå at rammen ble slengt over flåen når nota gikk ut (Figur 6). Notsensorene ble tatt av før triplex og festet på igjen i notbingen og det var derfor viktig med en løsning der man raskt fikk tak i rammen og løsnet den uten å påvirke fisket. Rammen som ble brukt i siste tokt fungerte godt og var enkel å ta av under innhaling og montere på igjen bak i notbingen.
Sensorene nederst i nota var festet på samme måte som dybdesensorene, med kjetting til hanefoten (Figur 6). Sensorene var utsatt for stor bevegelse, roterte lett og det var behov for å spenne de fast i hanefoten fra alle fire hjørner for å stabilisere dem. I de siste forsøkene ble sensoren montert i en ramme (lik den brukt for sensor under flåen) som gjorde at den var mer stabil.
Pitch- og dybdemålinger fra sensoren tyder på at det var perioder i fisket med mye bevegelse i sensoren og det var perioder der den hang relativt stabilt. Når nota går ut, tar det noen minutter før den synker og stabiliserer seg i sjøen. Sluttfasen av snurping og begynnelsen av innhaling ser ut til å være den beste perioden for sensoren plassert under flåen (Figur 7). Sensoren i ringene er i kontinuerlig bevegelse, men dybde og pitch ser ut til å endres som forventet og avstand til vannoverflate stemmer overens med pitch og dybde (Figur 8).

Figur 6. Montering av sensor i nota. I tidlige forsøk ble sensoren under flåen montert i en pose av notlin og kjetting under som vekt (bilde oppe til venstre). Denne ble videre utviklet til en liten robust stålramme med notlin og sensoren ble godt festet inni rammen som var enkel å montere av og på (bilde til høyre). Sensorer ble også festet i snurperingene først med kjetting fra de fire hjørnene til hanefoten (bilde nede til venstre) så i senere forsøk i en lignende ramme som sensoren under flåen for mer stabilitet.
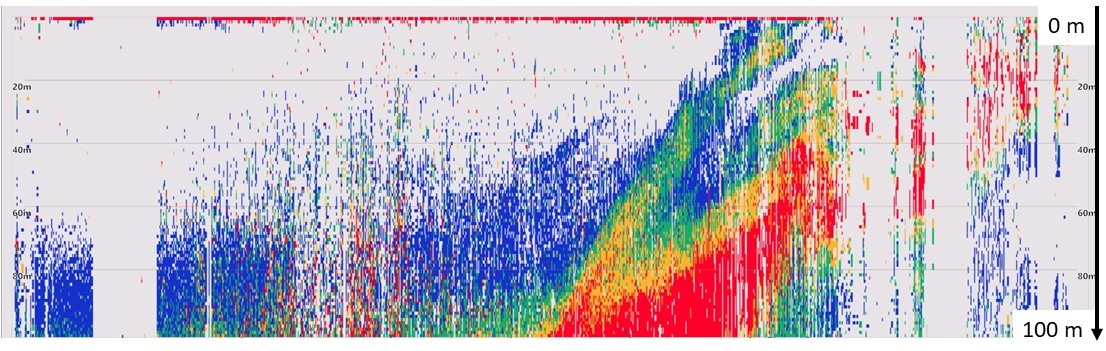
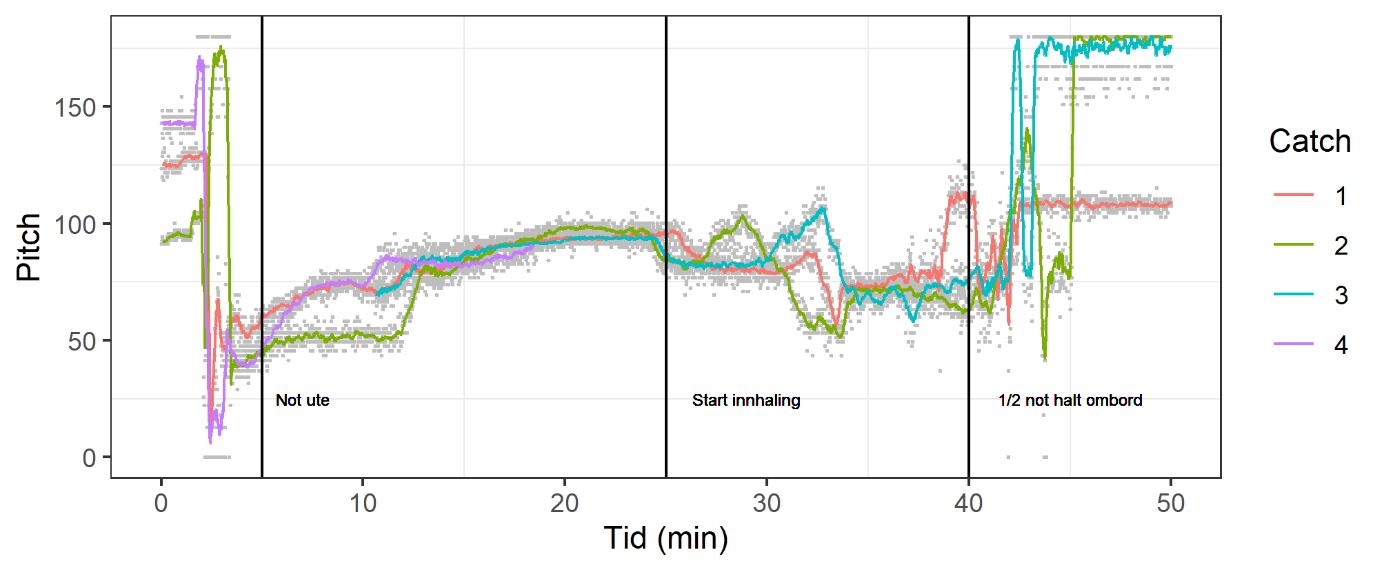
Figur 7. Øverst: Eksempel på ekkogram fra notsensor montert noen meter under flåen i et kast uten fangst. Fargeskalaen går fra blå – grønn – gul – rød med økende ekkostyrke. Ekkoloddet er i ekkogrammet plassert på “0 m” og ser skrått nedover i nota når pitch er rundt 90 grader. Tiden i ekkogrammet er omtrent samme som i den nederste figuren (fra start av kast til omtrent halv not er halt inn). Nederst: Notsensor pitch målt i fire kast med ekstern sensor som vist i midterste figur.
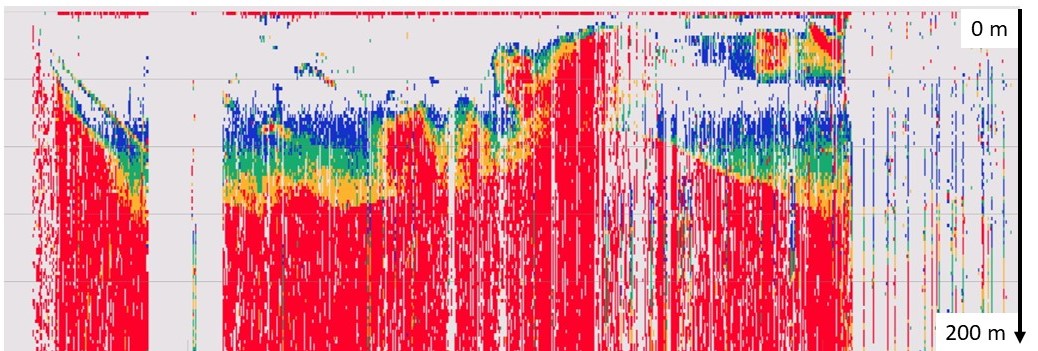
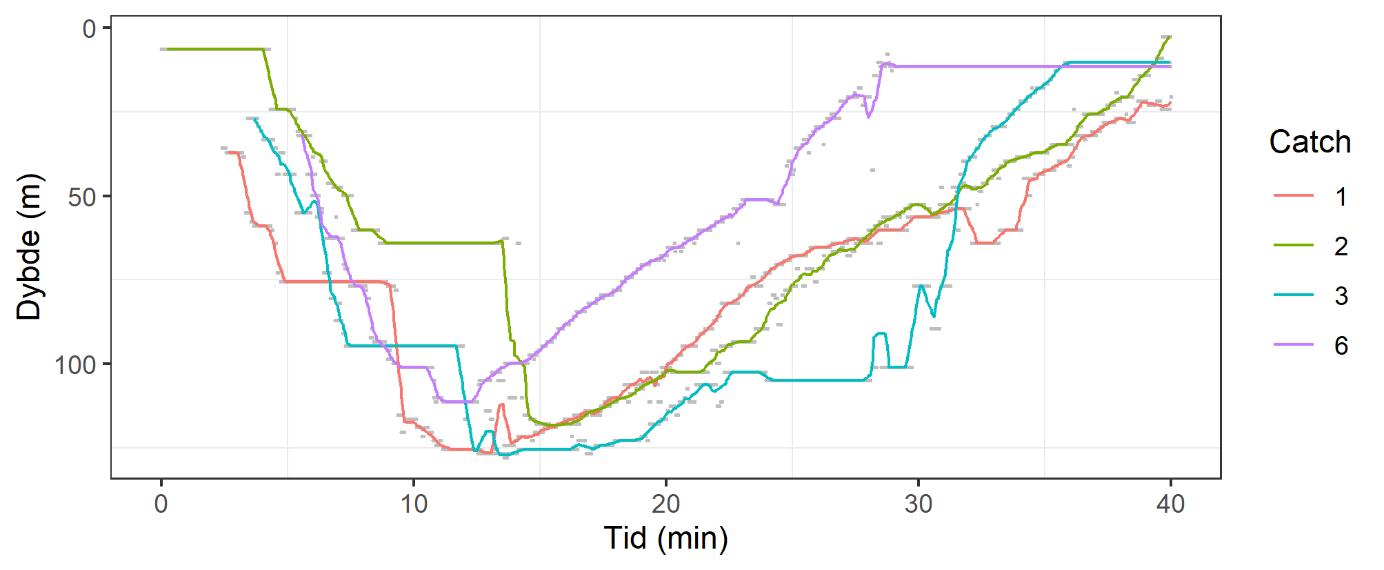
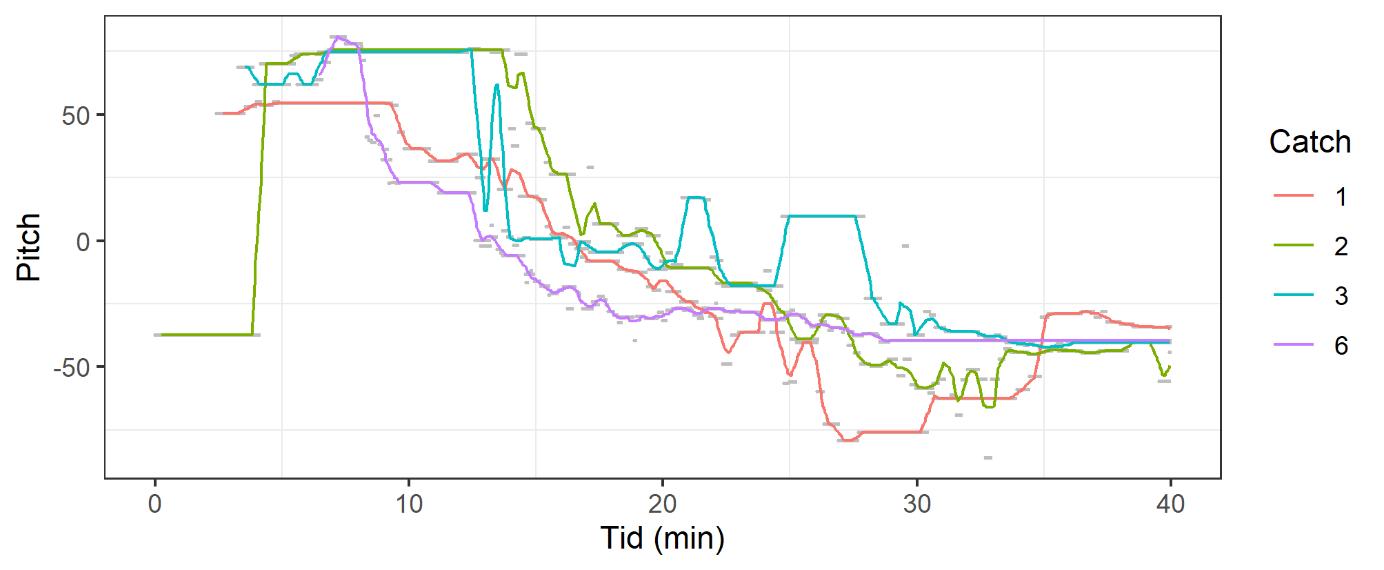
Figur 8. Øverst: Et eksempel på ekkogram fra sensor montert i snurperingene i et kast med 45 tonn makrell. Fargeskalaen går fra blå – grønn – gul – rød med økende ekkostyrke. Ekkoloddet er i ekkogrammet plassert på “0 m” og ser skrått oppover mot vannoverflaten (de sterke røde ekkoene er fra overflaten). Tiden i ekkogrammet er omtrent samme som i dybde og pitch figurene (fra start av kast til nota er ferdig snurpet). Midten: Sensordybde målt i fire kast. Nederst: Sensorpitch målt i fire kast. Se figurene 2 og 16 for forklaring på pitch.
2.5 - Data visualisering og tolking
Dataene ble visualisert med Simrad TV80-programvaren (Kongsberg Maritime AS). Det er ikke mulig å kalibrere sensorenes ekkolodd, dermed har man ingen referanseverdier for ekkostyrke i fargeskalaensom og kvantitativ tolking er ikke mulig. I vitenskapelige ekkolodd er fargeskalaen basert på verdier av akustisk tilbakespredningsstyrke per volumenhet og man har god kunnskap om verdier fra fisk, overflate, bunn og notlin og det er dermed enklere å tolke dataene.
Datakvaliteten er avhengig av kontakt med hydrofon (blir dataene overført?), oppløsning på dataene (er det god nok oppløsning til å skille fisk fra støy og not?), stabilitet på sensor (mye bevegelse skaper støy på ekkogrammet), hvilken retning ekkoloddstrålen har (sensoren må være rettet inn i nota ikke mot overflate, bunn eller mot notveggen).
Kontakten mellom sensor og hydrofon var stabil når hydrofon var på 12 m dybde og sensoren var rettet noenlunde mot hydrofon. I store fangster var kontakten betydelig dårligere, dette vises i figur 9 «Makrellfangst med sensor i ringene» og figur 10 «Sildefangst med sensor under flåen». Det er ikke bekreftet om det er mye fisk mellom sensor og hydrofon som førte til blokkering og forstyrrelser av signalene.
Oppløsningen på ekkolodd-dataene er relativt lav på grunn av ekkoloddets store åpningsvinkel. En åpningsvinkel på 33 grader gir en stråle som er 30 m i diameter på 50 m avstand og 60 m på 100 m avstand. Det var også noe usikkerhet i retningen til ekkoloddet i forhold til nota og dermed vanskelig å identifisere hva ekkoene viste.
Det var ikke mulig å identifisere makrell med sensor under flåen til tross for stor fangst (>400 t). Data fra sensoren montert i snurperingene i samme kast viser tegn til fisk (Figur 9). Sterke ekkoer foran sensor og svak kontakt med hydrofon. I store sildefangster var det motsatt (Figur 10). Ingen tegn til fisk i sensor montert i snurperingene mens sensoren montert under flåen viste sterke ekkoer og svak kontakt med hydrofon. Det kan være på grunn av forskjellig atferd i nota. Makrellen kan ha holdt seg i bortre enden av nota og dypere i vannet og kom dermed ikke inn i ekkoloddstrålen i begynnelsen av kastet. Silden på andre siden kan ha vært fordelt nærmere overflaten og midt i nota og ble dermed registrert med sensor under flåen. Dette er spekulasjoner og det er behov for flere tester og optimalisering av innstillinger for at man skal få sikrere registreringer.
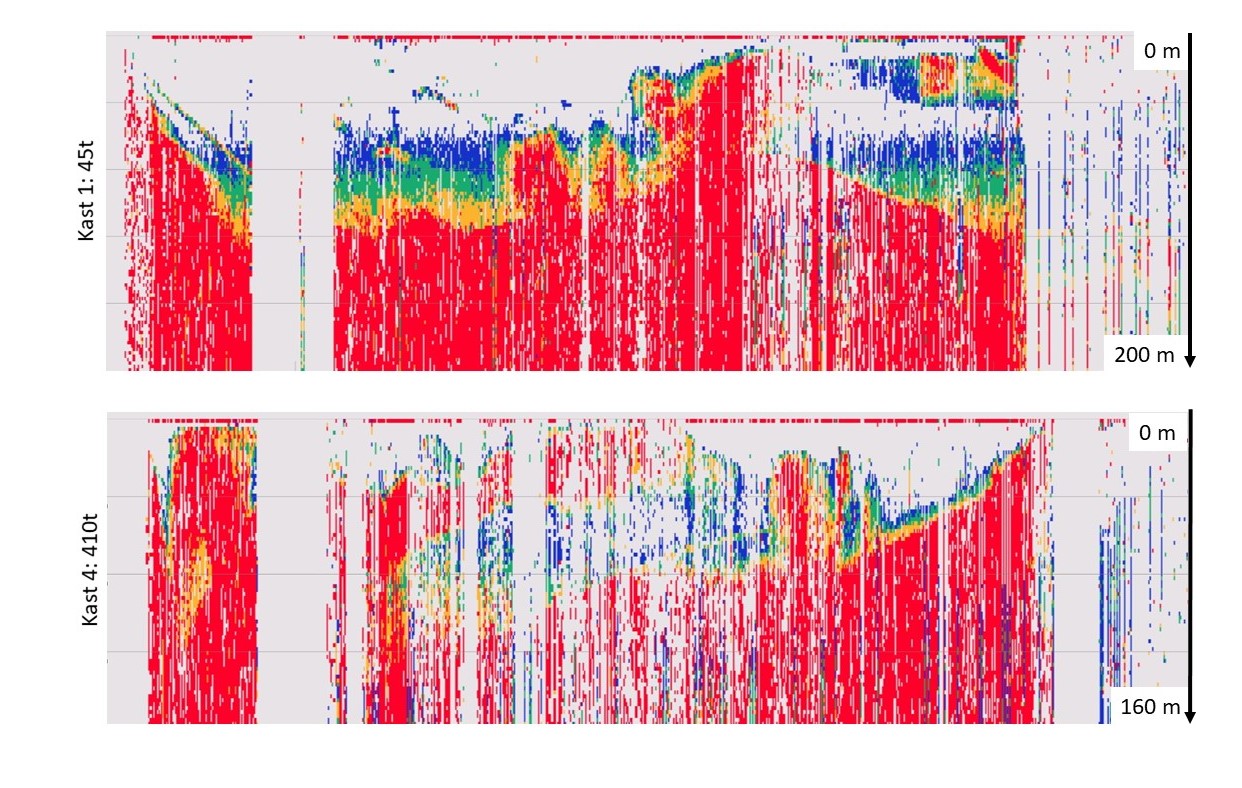
Figur 9. Sammenligning av ekkogram fra to makrellfangster der sensoren var montert i snurperingene omtrent midt på notas lengde. Øverst er kast med 45 tonn (rekkevidde 200m) og nederst kast med 410 tonn (rekkevidde 160m) makrell. Fargeskalaen går fra blå – grønn – gul – rød med økende ekkostyrke. Ekkoloddet er i ekkogrammet plassert på “0 m” og ser hovedsakelig skrått oppover mot vannoverflaten. De sterke røde ekkoene lengst unna sensoren er overflate. Tiden i ekkogrammet er fra start av kast til nota er sammensnurpet.
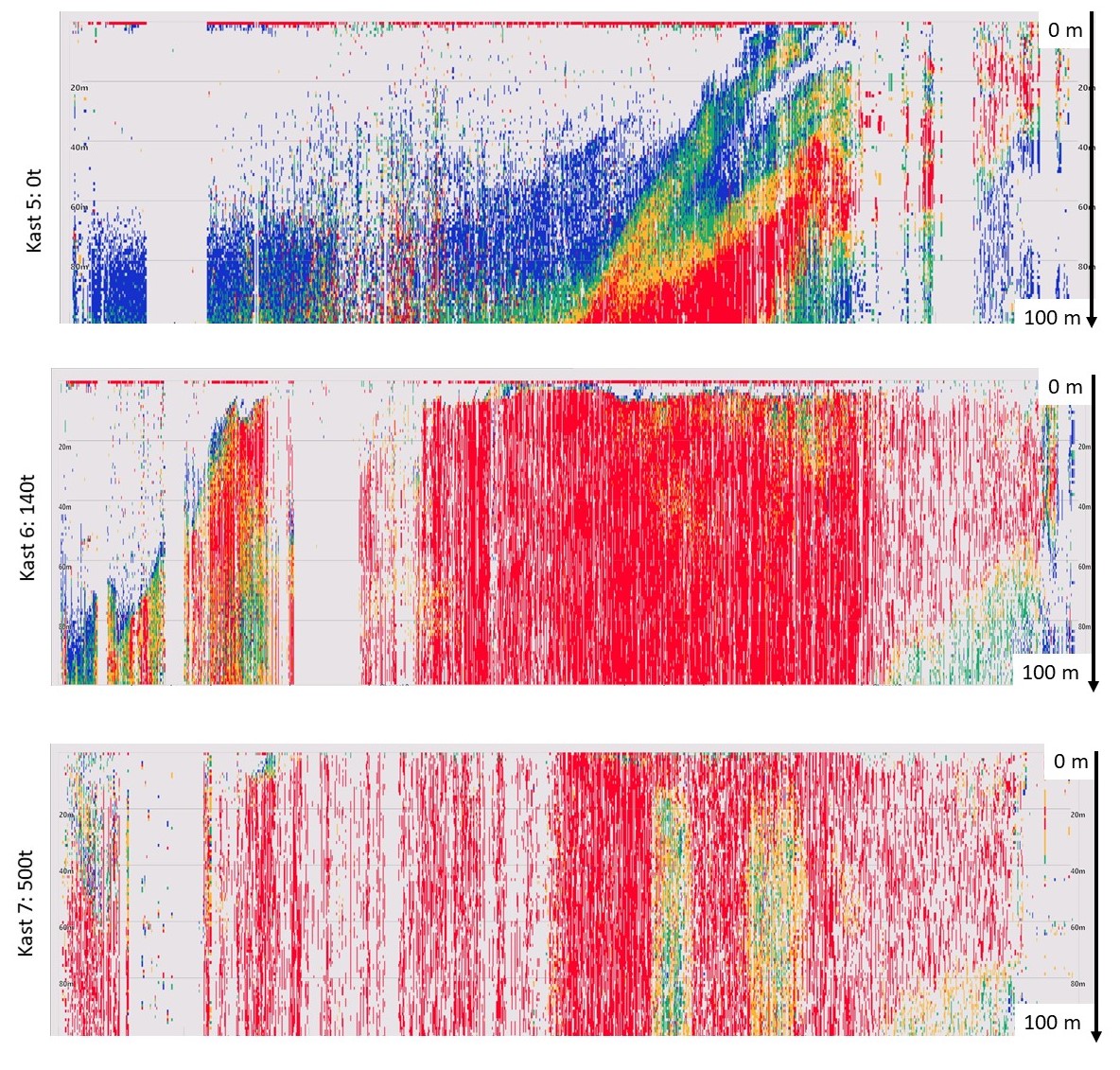
Figur 10. Eksempler av ekkogram fra tre sildefangster der sensoren var montert noen meter under flåen omtrent midt på notas lengde. Øverst er kast uten fangst, i midten kast med 140 tonn og nederst kast med 500 tonn sild. Fargeskalaen går fra blå – grønn – gul – rød med økende ekkostyrke. Tiden i ekkogrammet er fra start av kast til omtrent halv not er halt inn. Ekkoloddet er i ekkogrammet plassert på “0 m” og ser skrått nedover og inn i nota.
3 - Spesifikasjoner for montering og bruk av fangstovervåkingssensorer i notfiske
Anbefalinger for montering og bruk av notsensorer basert på forsøkene som er gjennomført:
-
Hydrofon montert på minst 12 m dybde gir stabil kontakt med sensor også under snurping da det ofte er mye luftbobler fra propellere og støy fra maskineri (Figur 11).
-
Notsensor montert 3-4 meter under flåen omtrent midt på notas lengde og med -30 graders pitch og 100 m range på ekkoloddstråle gir en relativt god dekning av notas volum, spesielt i sluttfasen av snurping og startfasen av innhaling (Figur 11).
-
Notsensor montert i snurperingene omtrent midt på notas lengde og med +30 graders pitch og 100 m range på ekkoloddstrålen dekket relativt godt notas volum under snurping (figur 12 og 13).
-
Sensoren under flåen festes godt i stålramme med nok vekt for minst mulig påvirkning av bevegelser i nota. Nedre del er løs for å ikke bli påvirket av notas form. Slakt tau nederst hindrer at sensoren blir slengt over flåen under utsetting (Figur 14).
-
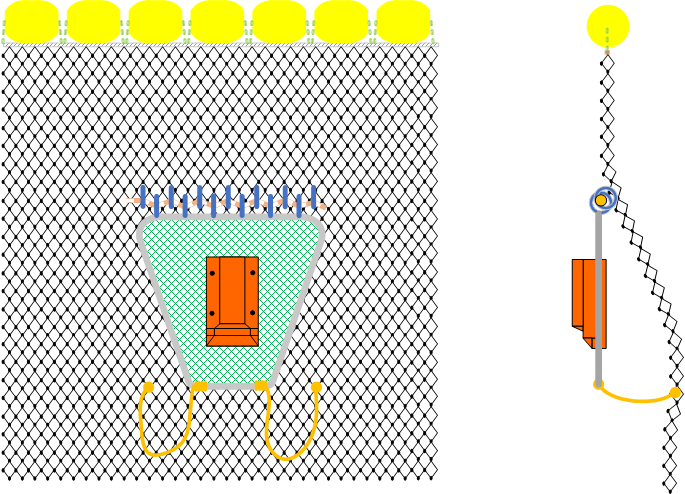
Sensor i snurperingene festes godt i stålramme som festes til hanefoten fra alle fire hjørnene for å unngå rotering (Figur 15).
-
Foreløpige anbefalinger for sensorinnstillinger vises i tabell 2.
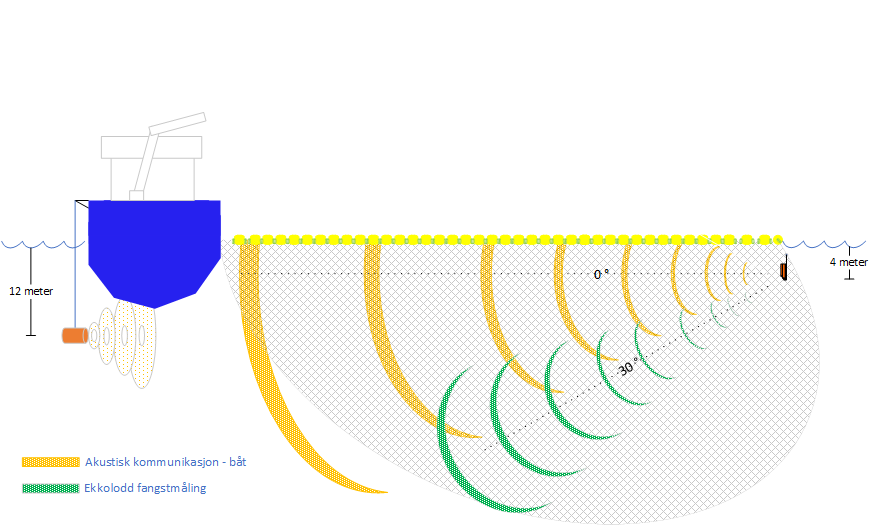
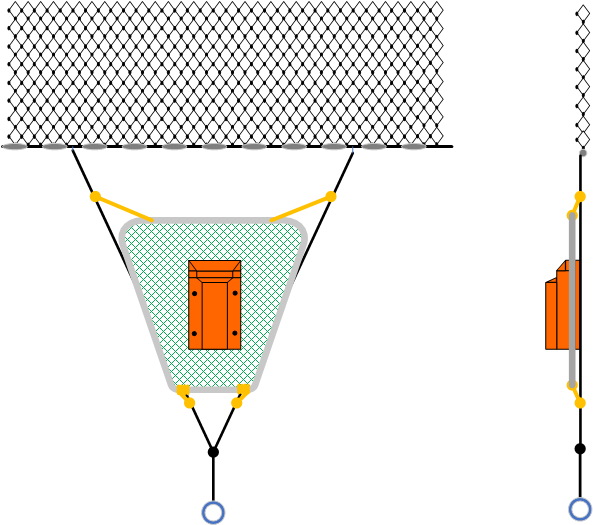
Figur 11 . Skisse som viser notsensor montering på nota 4 meter under flåen, hydrofon 12 meter under vannoverflaten på babord side av båten og kommunikasjon mellom sensor og hydrofon samt ekkoloddstrålens retning og spredning.
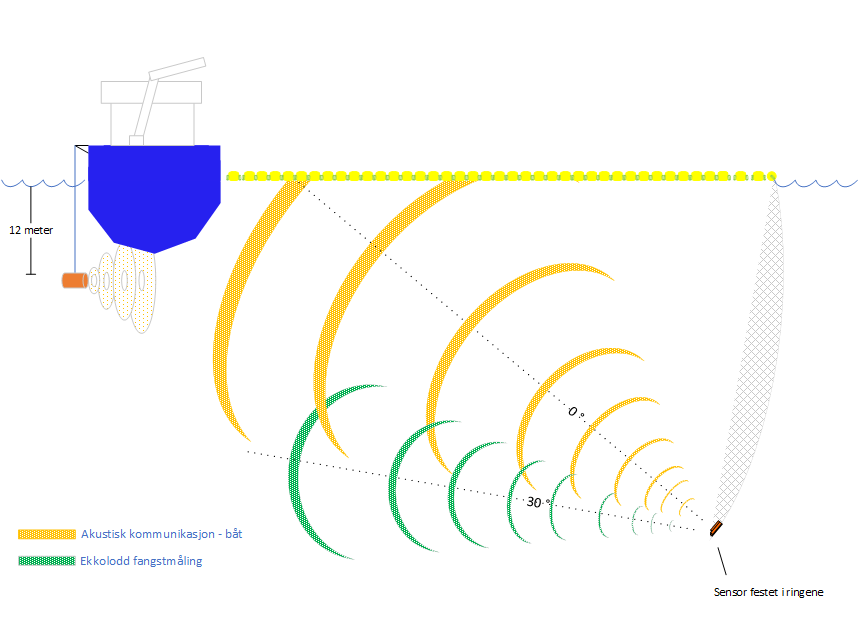
Figur 12 . Skisse som viser notsensor montert i snurperingene, hydrofon 12 meter under vannoverflaten på babord side av båten og kommunikasjon mellom sensor og hydrofon samt ekkolodd signalets retning og spredning.
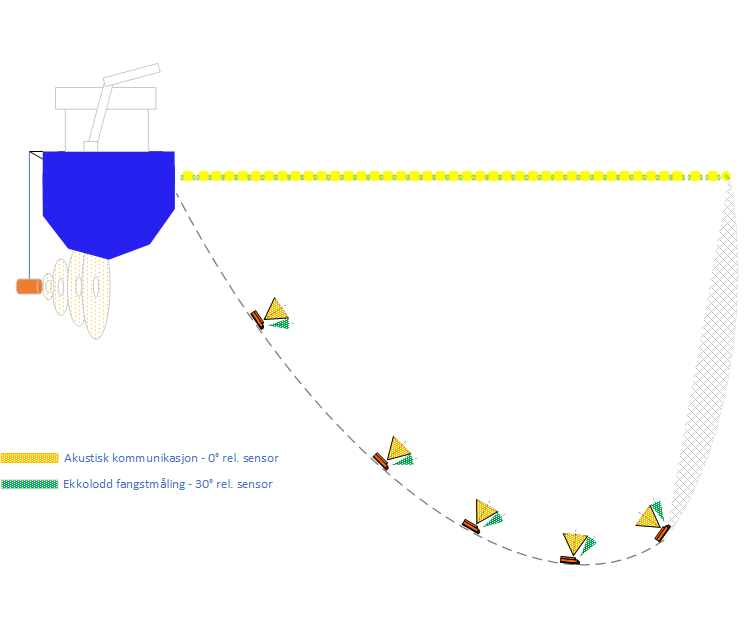
Figur 13. Skisse som viser hvordan notsensorsignalene for kommunikasjon og ekkolodd er forventet å endres under snurping når sensor er montert i snurperingene.
Figur 14 . Skisse for hvordan notsensor kan monteres på nota på en måte der den er godt festet, relativt stabil og enkel å montere av og på. Sensoren er festet inni en stålramme. Øvre del av rammen er festet i nota og nedre del av rammen er festet til nota med to slakke tau som sikrer at rammen ikke blir slengt over flåen.
Figur 15 . Skisse for hvordan sensoren kan monteres i hanefoten nederst på nota på en måte der den er godt festet, relativt stabil og enkel å av og påmontere. Sensoren er festet inni en stålramme.
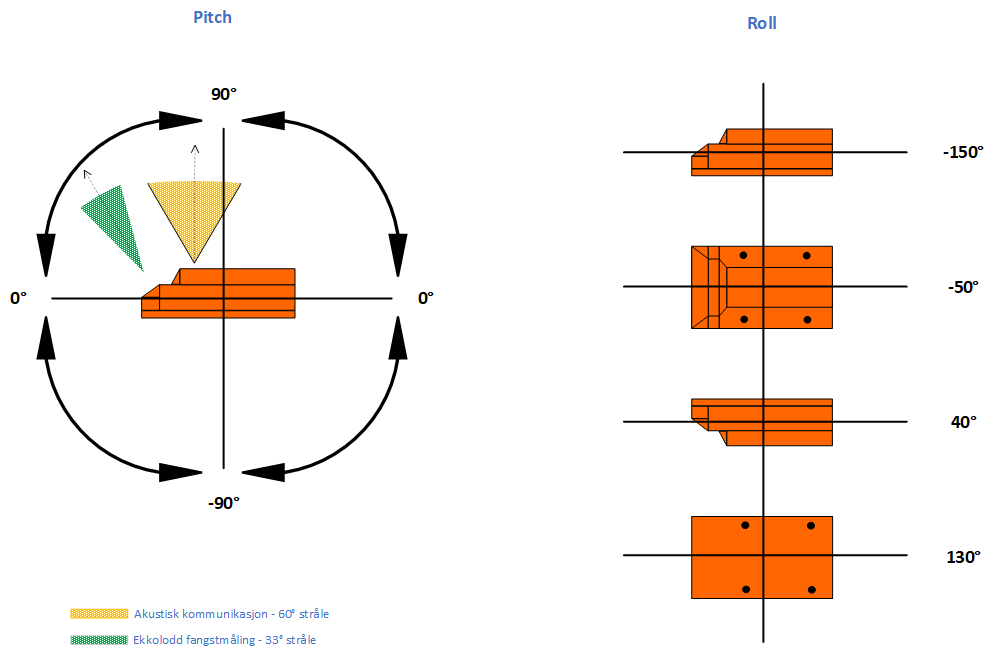
Figur 16. Illustrasjon av notsensorens pitch og roll målinger. Verdiene er lest av fra Simrad sitt system.
-
Tabell 2. Sensorinnstillinger som ble brukt i forsøkene og anbefales foreløpig Rekkevidde 100 m Pulse duration 512 us TVG 20 – 35 Log (dB) Gain 16 Ping rate 1.1s
4 - Konklusjon og videre anbefalinger
Det gjenstår arbeid før notsensorene kan være en praktisk og nyttig løsning for fangstovervåking. Likevel er det potensial. God kontakt mellom sensor og hydrofon oppnås ved å ha hydrofonen dypere i vannet. Stabil og robust montering av sensorer i nota, fungerte best med sensor festet på nota noen meter under flåen, men også i snurperingene. Det var antydning til identifikasjon av fisk på ekkoloddene.
Spørsmålet er om ekkoloddet i notsensoren har bra nok oppløsning for identifisering av fangst i nota eller om flere smalere stråler bør vurderes. Det er flere sonarprodusenter som i dag tilbyr instrumentering som kan gi veldig detaljert informasjon om fiskestimer både på stim og individnivå. Bredbåndsteknologi har vist lovende resultat innen størrelsesestimering og artsidentifikasjon også i fiskestimer. Flerstrålesonarer og skanningsonarer dekker et stort volum med høy oppløsning. Samtidig brukes det enklere og betydelig rimeligere varianter, som ekkoloddet i notsensoren, som gir nyttig kvalitativ informasjon om fangsten i trålfiskerier. Spørsmålet er hvor stort behov er det for informasjonen og hva fiskerne er villige til å betale for slik informasjon. Våre forsøk tyder på at det er fult mulig å montere sensorer i nota på stabil og robust måte og med god kontakt til hydrofon på båten.
Videre anbefalinger:
-
En sensor som kan gå gjennom triplex vil være mer praktisk for bruk i kommersielt fiske og gir muligheter for montering lenger nede på nota der det kan være mindre påvirkning av bølger.
-
Det er behov for videre testing med sensorene for å optimalisere ekkoloddinnstillinger. Forsøk i kontrollerte omgivelser f.eks. måle fisk i merd kan gi nyttig informasjon om hvordan fisk og not vises på ekkogrammet og om optimale sensorinnstillinger.
-
Vurdere om det er bedre med smalere ekkoloddstråle og eventuelt flere stråler i samme sensor, en styrbar smal stråle, scanning sonar eller flere sensorer med smalere stråle plassert på forskjellige steder i nota.
-
Hydrofon på elektrisk vinsj fungerte godt, men krever videre utvikling før den er praktisk i kommersielt fiske. Det kan også vurderes å feste hydrofon på nota, med kabel opp til flåen og wifi-kontakt til båten.
5 - Takk
Vi takker Thor Bærhaugen (Kongsberg Maritime AS) for godt samarbeid med utvikling og testing av systemet gjennom hele forsøksperioden samt kommentarer til denne rapporten. Vi takker mannskapene på M/S Vendla og M/S Fiskebas for godt samarbeid og produktive tokt. Vi takker Ivar Wangen (Kongsberg Maritime AS) for lån av utstyr, f.eks. ekkoloddbøye, og hjelp med å finne løsninger til akustiske systemer, f.eks. ekkoloddløsning under flyvende drone. Vi takker Gavin Macaulay for hjelp med akustiske problemstillinger underveis. Vi takker Birdview AS for godt samarbeid innen utvikling og testing av ekkolodd under drone. Vi takker Sigurd Hannaas for hjelpe med rapportredigering. Forsøkene er finansiert av Fiskeri- og havbruksnæringens forskningsfond (FHF 901350).
6 - Referanser
Anders, N., Breen, M., Saltskar, J., Totland, B., Ovredal, J. T. and Vold, A. 2019. Behavioural and welfare implications of a new slipping methodology for purse seine fisheries in Norwegian waters. Plos One 14(3): 24.
Korneliussen, R. J., Heggelund, Y., Eliassen, I. K., Johansen, G. O., 2009. Acoustic species identification of schooling fish. Ices Journal of Marine Science 66(6): 1111-1118.
Kubilius, R., Macaulay, G. J. and Ona, E. 2020. Remote sizing of fish-like targets using broadband acoustics. Fisheries Research 228: 10.
Marcalo, A., Breen, M., Tenningen, M., Onandia, I., Arregi, L. and Goncalves, M.S. 2019. Mitigationg slipping-related mortality from purse seine fisheries for small pelagic fish: Case studies from European Atlantic waters. The European Landing Obligation - Reducing discards in complex, multi-species and multi-jurisdictional fiheries. S. Ulmann, C. Ulrich and S. J. Kennelly. Switzerland, Springer Nature Switzerland AG: 438.
Misund, O. A. and A. K. Beltestad 1995. Survival of herring after simulated net bursts and conventional storage in net pens. Fisheries Research 22(3-4): 293-297.
Peña, H., Macaulay, G., Ona, E., Vatnehol, S and Holmin, A. J. 2021. Estimating individual fish school biomass using digital omnidirectional sonars, applied to mackerel and herring. ICES Journal of Marine Science. doi:10.1093/icesjms/fsaa237
Pérez Roda, M.A., Gilman, E., Huntington, T., Kennelly, S.J., Suuronen, P., Chaloupka, M. and Medley, P. 2019. A third assessment of global marine fisheries discards. Rome, FAO, FAO Fisheries and Aquaculture Technical Paper 78.
Suuronen, P., Chopin, F., Glass, C., Lokkeborg, S., Matsushita, Y., Queirolo, D., Rihan, D. (2012). "Low impact and fuel efficient fishing-Looking beyond the horizon." Fisheries Research 119: 135-146.
Tenningen, M., Øvredal, J. T. and Macaulay, G. 2018. Akustisk fangstovervåking i not – Utfordringer og løsningsforslag til bedre metodikk. Rapport fra Havforskningen 42-2018. ISSN:1893-4536. https://www.hi.no/resources/publikasjoner/rapport-fra-havforskningen/2018/42-2018_akustisk_fangstovervaking_i_not.pdf
Tenningen, M., Breen, M., Saltskår, J., Schuster, E., Macaulay, G., Sistiaga, M. and Exposito, I. 2019. Fangstkontroll og fiskevelferd i ringnotfiske etter sild – M/S Vendla 11.-24. juni 2019. Toktrapport Nr 7-2019. Havforskningsinstituttet. ISSN 15036294. https://www.hi.no/resources/Toktrapport-7-2019.pdf
Tenningen, M., Saltskår, J., Schuster, E., Øvredal J.T., Bærhaugen, T., Foss, B., Høgalmen, A. and Peña. H. 2020a. Fangstkontroll og fiskevelferd i ringnotfiske etter NVG sild – MS Fiskebas 24.-29. februar 2020. Toktrapport Nr 10-2020. Havforskningsinstituttet. ISSN 15036294. https://www.hi.no/resources/Toktrapport-nr-10-20.pdf
Tenningen, M., Breen, M., Saltskår, J., Schuster, E. and Hannaas, S. 2020b. Fangstkontroll og fiskevelferd i ringnotfiske etter NVG sild - Fiskebas 15.10 – 22.10. Toktrapport Havforskningsinstituttet (sendt til publisering)