En selvgående kajakk utstyrt med elmotor og ekkolodd kan gjøre vitenskapelige undersøkelser til en brøkdel av kostnaden til et forskningsskip – og samtidig forstyrre langt mindre. I sommer ble denne prototypen brukt for å undersøke samspillet mellom tobis og lunde ved fuglefjellet Runde.
Publisert: 11.10.2018Forfatter: Kjartan Mæstad
– Tobisen er en viktig del av dietten til lundefuglen, en bestand som har slitt de siste årene. I tillegg til at kajakken forstyrrer langt mindre enn en stor båt, kan den også brukes på områder som ellers er vanskelig tilgjengelig, sier prosjektleder Espen Johnsen ved Havforskningsinstituttet.
Forsøkene ved Runde var første gangen den nye dronekajakken ble testet i selvkjørende modus med fullt utstyr, deriblant med senkekjøl påmontert ekkoloddsvinger og et fullblods vitenskapelig bredbåndsekkolodd – et EK 80 fra Simrad – plassert i skroget.
– Det gikk helt etter planen den første dagen på Runde, men på kvelden fikk vi en vannlekkasje i styringsmotoren. Til tross for iherdig jobbing til sent på natt, klarte vi ikke å reparere den ødelagte motoren, men vi fikk bekreftet at prototypen fungerer stort sett som den skal, sier Johnsen.
Rimelig og tett på
Det marine økosystemet er i stadig endring, og mange steder i verden er balansen og produktiviteten i økosystemene truet grunnet stor menneskelig påvirkning. I enkelte norske kystområder ser man også tegn på lavere produktivitet i systemet. Den dramatiske nedgangen i lundefuglbestanden på Runde de siste tiårene er et eksempel på en slik forandring.
I Norge har Havforskningsinstituttet en lang tradisjon med å kartlegge utbredelse og mengde av de store fiskeressursene i havet. Mye av overvåkningen skjer fra store forskningsfartøy der trål og ekkolodd er de viktigste redskapene for datainnsamling.
– Særlig for de pelagiske artene som sild, lodde, tobis, kolmule og brisling er vi avhengig av vitenskapelige ekkolodd for å måle mengde fisk. Det er en utfordring at disse store skipene er kostbare å drifte, og de kan heller ikke operere i grunne og trange kystnære områder. Et annet område som har hatt mye fokus er om store skip skremmer fisk før de måles, slik at målingene blir mindre troverdige, påpeker Johnsen.
Den nye dronekajakken har potensial til å bidra til å løse disse utfordringene.
Rivende utvikling på dronefronten
Utviklingen på dronefronten den siste tiden tilsier at tiden er moden for et droneprosjekt ved instituttet. Blant kravspesifikasjonene er at kajakken skal holde opptil 10 knops fart. Dermed kan den gå et stykke foran et forskningsfartøy og gjøre det mulig å måle om fisk blir skremt av et stort skip. Dronen skal også være stillegående, og derfor drives den av en elektrisk motor. Den skal kunne fjernstyres og seile mellom forhåndsdefinerte «rutepunkter». I tillegg skal kajakken være billig i innkjøp, kunne sjøsettes fra land eller et følgefartøy, og være enkel i bruk.
– Den største utfordringen i et prosjekt som dette, ligger i planleggingsfasen. Et godt, gjennomtenkt design og valg av egnete enkeltkomponenter er avgjørende for hvor vellykket sluttproduktet blir, sier Atle Totland som har hatt det tekniske ansvaret.
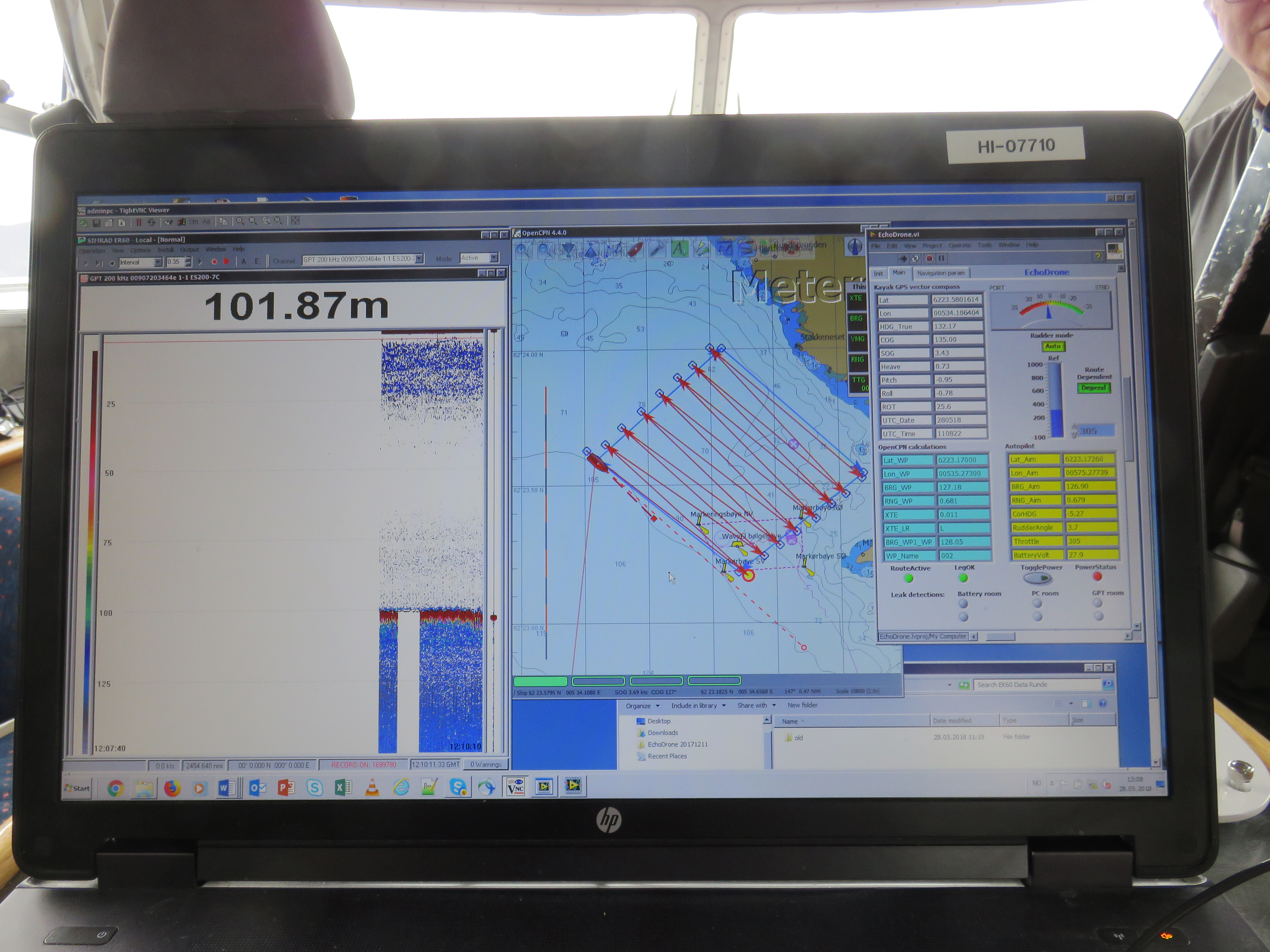
Sikk-sakk strekene midt på bilder er de forhåndsdefinerte kurslinjene som dronekajakken fulgte da den ble sendt av gårde på egenhånd. (Foto: Espen Johnsen / Havforskningsinstituttet)
Mange mulige bruksområder
Johnsen og de andre deltakerne i prosjektteamet ser for seg mange fremtidige bruksområder for en slik kajakkdrone. Et av dem er sildeovervåkningen i Norskehavet. Noen år kan en betydelig andel av silda befinne seg helt oppe i overflaten, noe som betyr store utfordringer med å måle forekomstene med ekkolodd på et havgående forskningsfartøy. Her er ekkoloddet montert på en senkekjøl i bunnen av fartøyet. Derfor klarer ikke slike ekkolodd å «se» noe fisk før på 10 meters dyp, mens senkekjølen på kajakkdronen stikker bare 1,5 meter under overflaten.
Et annet problem er at lyd og trykkbølgen fra et skip kan skremme vekk fisken slik at de ikke lenger er under båten når ekkoloddene skal måle dem. Med den lille, stillegående dronen kan man avsløre om slike problemer finnes ved at drone og skip kjører parallelt og måler med ekkoloddene. Dersom det ikke er problemer med unnvikelse, skal drone og skip måle lik mengde fisk over tid, eventuelt må man korrigere for problemet.
Internasjonal videreutvikling
Et annet bruksområde kan være i varmere strøk hvor det skal gjøres undersøkelser av fiskeressurser på grunt vann i områder med korallrev. Inn her kan ikke et stort skip gå. Det vil derfor være svært nyttig å sende en ekkolodd-drone inn for å foreta kartleggingen nær land. En tilsvarende utfordring kan man finne i smale, krokete fjordarmer i Norge. Kajakkdronen kan fraktes på en bil-tilhenger og gjennomføre kartleggingen av fjordressursene for et rimelig beløp.
– Vi er også med på et nytt forskningsprosjekt «Utvikling av en autonom plattform for hydroakustisk datainnsamling» som er finansiert av Nordisk Ministerråd. Prosjektet skal starte i 2018 og vare frem til utgangen av 2020. I samarbeid med bedrifter og universiteter fra Norge, Sverige, Danmark og Island skal vi jobbe videre med kajakken og nye akustikkdata for å øke vår forståelse det marine økosystemet, opplyser Johnsen
Sidepanel
Om prosjektet:
Med i samarbeid er Ronny Riise fra «God-tur», Nigel Dennis fra «Sea Kayaking UK», Runde Miljøsenter, Alex De Robertis fra National Marine Fisheries Service, Alaska Fisheries Science Center. I 2015 fikk prosjektet 3,4 millioner i støtte fra Norges forskningsråd. Havforskningsinstituttet skulle stille med ekkolodd og skipstid ved uttesting av kajakken til havs.
Farkost og utstyr
Fartøyet er en tomanns havkajakk på 7 meter fra «Sea Kayaking» og er kjent for å ha en god balanse, retningsstabilitet, hastighet, robusthet og lastekapasitet.
Motor og batteri kommer fra tyske Torqeedo. Tilpasning av motorfeste og senkekjøl er gjort ved kajakkfabrikken i Wales.
Den kraftige elektriske påhengsmotoren sørger for en toppfart på 8.5 knop.
Operasjonstiden med dagens batterier er anslått til ca. 7 timer ved full fart. Motoren har en svært stor propell og lav omdreiningshastighet.
Senkekjølen har plass til to ekkoloddsvingere (på 120 kHz og 200 kHz) og stikker ned til maks 1,5 meter under skroget.
Svingerne er plassert så dypt at luftbobler fra overflaten ikke skal blokkere lydsignalene til og fra ekkoloddet. Blyloddet i bunn gir i tillegg farkosten et så lavt tyngdepunkt at den ikke velter selv i høy sjø.
Dronen er utstyrt med navigasjonssystemer av god kvalitet for posisjon, kompassretning osv.
En langtrekkende trådløs Ethernet-forbindelse sørger for at dronens PC kan opereres fra moderfartøyet helt til kajakken forsvinner ut av syne under horisonten.
Flere programmer kjøres på dronens PC for å logge data fra ekkolodd og andre sensorer. Et styringsprogram sørger for at dronen følger den ruten som er satt opp i et kartprogram. Alternativt kan dronen styres manuelt fra moderfartøyet dersom det er i nærheten.






 Sikk-sakk strekene midt på bilder er de forhåndsdefinerte kurslinjene som dronekajakken fulgte da den ble sendt av gårde på egenhånd. (Foto: Espen Johnsen / Havforskningsinstituttet)
Sikk-sakk strekene midt på bilder er de forhåndsdefinerte kurslinjene som dronekajakken fulgte da den ble sendt av gårde på egenhånd. (Foto: Espen Johnsen / Havforskningsinstituttet)